ロボパラで受注製作した動物ロボット、アフリカの大地を大暴れ、イノシシロボットのご紹介です!
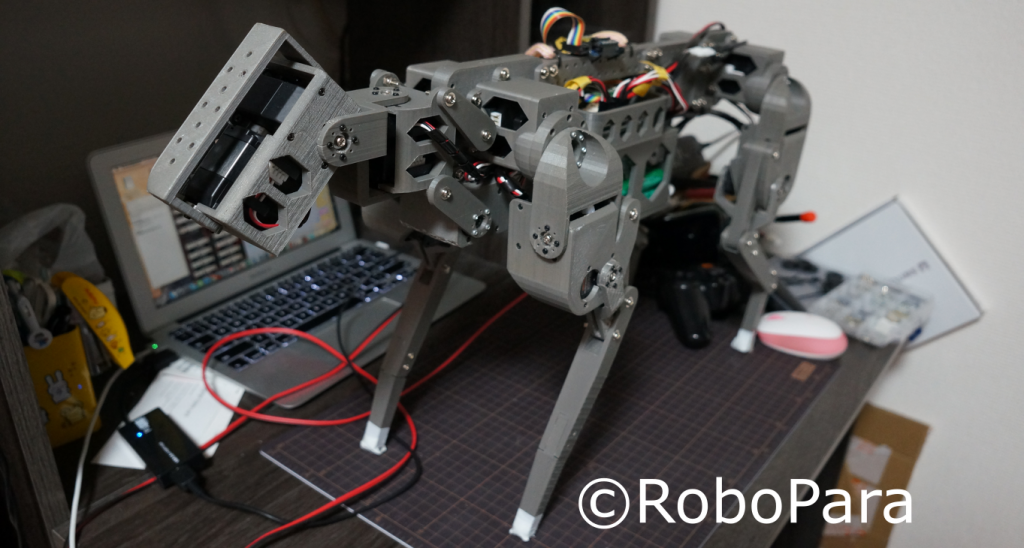
全長60センチ近くある、中型の4足歩行動物ロボットで、モデルになってる動物は、なんとイノシシ!

前回と同様に開発期間が短かったので、ハードをどうしようかと悩みました…。CNC加工に出してもいいけど部品点数を考えると設計ミスがあると絶対に間に合わない。
というわけで、3Dプリンターでほとんどのパーツを造形することに。3Dプリンターならたとえ設計ミスがあっても数時間のロスですみますし。デザインさえ修正してしまえば、後は3Dプリンターで焼くだけですからね。
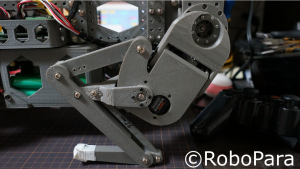
足の部分はリンク機構を使うことでサーボを太もも部分に置き、できるだけ細くしました。豚類って意外と足の関節が細いんです。もちろんサーボはFutabaさんのRS405です。コントローラーはおなじみVstoneさんのVSRC003です。
フィラメントはABSを使いました。厚みと積層方向さえ気をつければ、このサイズのロボットでも3Dプリントパーツで大丈夫です。
ただ、今回のロボット…。
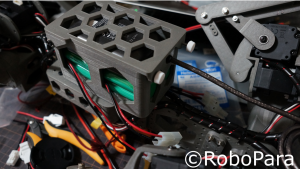
野生動物と格闘になる可能性があるので、弱そうな場所はアルミに変えました。


デスクトップサイズのCNCでもこのぐらいのパーツなら1、2時間で切削できちゃいます。
総重量が外装なしで3キロもあるので、肘の関節が負荷が許容範囲ギリギリでした。
リンク機構の組み方に問題があるのですが、外装との兼ね合いもあって修正しませんでした。
外装をつけると多分5キロ近くあります(涙。。。
今回も残念ながら外装を取り付けた写真はお見せできません。一般公開が始まったらアップしますね。イギリスで放送が始まりました!
実際使ってみた感想ですが、RS405の耐久性に大満足です。5日間、1日6時間ほど使いましたが、壊れたサーボの数、なんと0個です!!!
3Dプリント部品に関しては、やっぱり積層が弱点ですね。
大きな問題は出ませんしたが、ところどころ亀裂が入ったりしたので、設計とプリントするときの積層の向きが大切です。
亀裂の接着にはアロンアルファの粘性が高いタイプ(ねずみ色)がオススメです。他種類だと力がかかるとすぐに割れてしまいます。エポキシでもいいですが、ABSを溶かして接着するわけではなく、上にのっかって固まるので接着面の工夫が必要です。後ははんだごてで溶かして溶接する方法も。
次はどんな動物かなを作るんだろう…。